7. [Algorithm] 다익스트라 알고리즘 (최단 경로)
다익스트라 알고리즘
최단 경로 알고리즘은 말 그대로 가장 짧은 경로를 찾는 알고리즘이다.
최단 경로 알고리즘 유형에는 다양한 종류가 있다. 대표적으로
- 다익스트라 최단 경로 알고리즘
- 플로이드 워셜
- 벨만 포드 알고리즘
이렇게 3가지이다.
이번 글에서는 다익스트라 알고리즘 에 대해서 알아보도록 하겠다.
다익스트라 알고리즘 (Dijkstra Algorithm)
- 다익스트라 알고리즘은 그래프에서 여러 개이 노드가 있을 때, 특정한 노드에서 출발하여 다른 노드로 가는 각각의 최단 경로를 구해주는 알고리즘
- 다익스트라는 매번 '가장 비용이 적은 노드'를 선택해서 임의의 과정을 반복하는데, 이 때문에 기본적으로 그리디 알고리즘으로 분류된다.
다익스트라 알고리즘의 원리
- 출발 노드를 설정
- 최단 거리 테이블을 초기화
- 방문하지 않는 노드 중에서 최단 거리가 가장 짧은 노드를 선택
- 해당 노드를 거쳐 가는 다른 노드로 가는 비용을 계산하여 최단 거리 테이블 갱신
- 3, 4번의 과정을 반복
최단 경로를 구하는 과정에서 최단 거리 테이블은 '각 노드에 대한 현재까지의 최단 거리 정보'를 항상 1차원 리스트에 저장하며 리스트를 계속 갱신하는 특징이 있다. 처리 과정에서 더 짧은 경로를 찾으면 '이제부터는 이 경로가 제일 짧은 경로야' 라고 갱신한다.
※그리디 알고리즘과 DP 알고리즘은 최단 경로 알고리즘에 그대로 적용된다는 특징이 있다. 다익스트라 알고리즘은 사실 그리디 알고리즘 및 DP 알고리즘의 한 유형으로 볼 수 있다.
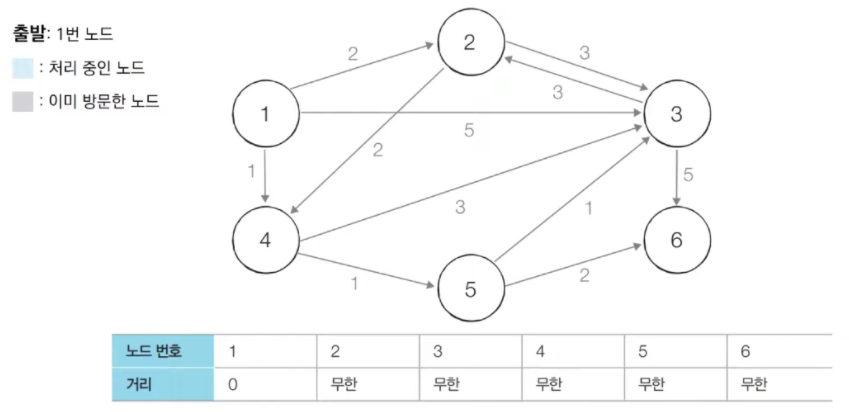
동작과정 그림
- step 0 : 먼저 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드를 선택하는데, 출발 노드에서 출발 노드로의 거리는 0으로 보기 때문에 처음에는 출발 노드가 선택된다.
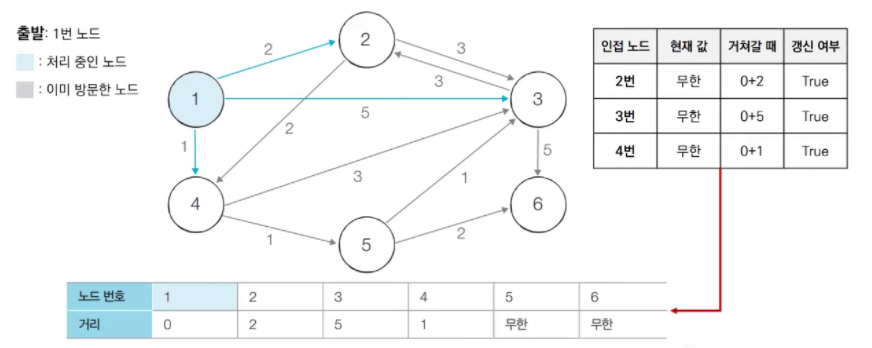
- step 1 : 이제 1번 노드를 거쳐 다른 노드로 가는 비용을 계산한다. 즉, 1번 노드와 연결된 모든 간선을 하나씩 확인하면 된다.
현재 1번 노드까지 오는 비용은 0이므로, 1번 노드를 거쳐서 2번, 3번, 4번 노드로 가는 최소 비용은 차례대로 2(0+2), 5(0+5), 1(0+1)이다. 현재 2번, 3번 4번 노드로 가는 비용이 '무한'으로 설정되어 있는데, 새 노드에 대해서 더 짧은 경로를 찾았으므로 각각 새로운 값으로 갱신한다.
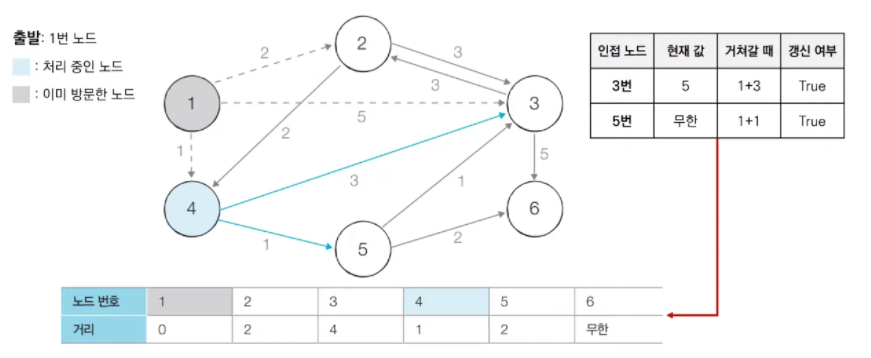
- step 2 : 이후의 모든 단계에서도 마찬가지로 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드를 선택해야 한다.
따라서 [step 2]에서는 4번 노드가 선택된다. 이어서 4번 노드를 거쳐서 갈 수 있는 노드를 확인한다.
4번 노드에서 갈 수 있는 노드는 3번과 5번이다. 이때 4번 노드까지의 최단거리는 1이므로 4번 노드를 거쳐서 3번과 5번 노드로 가는 최소 비용은 차례대로 4(1 + 3), 2(1 + 1)이다. 두 값은 기존의 리스트에 담겨 있던 값보다 작으므로 다음처럼 리스트가 갱신된다.
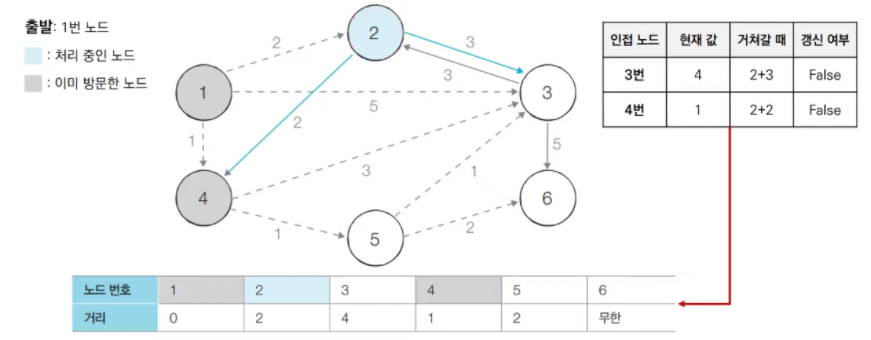
- step 3 : [step 3]에서는 2번 노드가 선택된다. 2번과 5번 노드까지의 최단 거리가 2로 값이 같은데 이럴 때는 일반적으로 번호가 작은 노드를 선택한다. 그리고 2번 노드를 거쳐서 도달할 수 있는 노드 중에서 거리가 더 짧은 경우가 있는지 확인한다.
이번 단계에서 2번 노드를 거쳐서 가는 경우, 현재의 최단 거리를 더 짧게 갱신할 수 있는 방법은 없다.
예를 들어 2번 노드를 거쳐서 3번 노드로 이동하는 경우, 5(2 + 3)만큼의 비용이 발생한다.
하지만 이미 현재 최단 거리 테이블에서 3번 노드까지의 최단 거리는 4이므로, 값이 갱신되지 않는다.
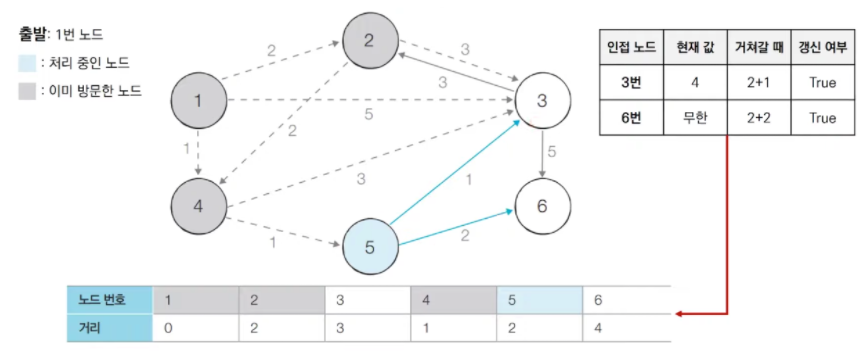
- step 4 : 이번에는 5번 노드가 선택된다. 5번 노드를 거쳐 3번과 6번 노드로 갈 수 있다. 현재 5번 노드까지 가는 최단 거리가 2이므로 5번 노드에서 3번 노드로 가는 거리인 1을 더한 3이 기존 값인 4보다 작기 때문에 새로운 값 3으로 갱신된다. 또한 6번 노드로 가는 거리도 마찬가지로 4로 갱신된다.
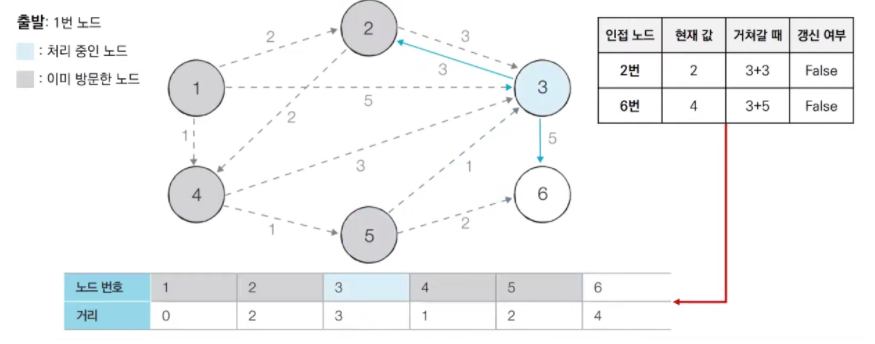
- step 5 : 이어서 최단 거리인 3번 노드를 선택한 뒤에 동일한 과정을 반복한다.
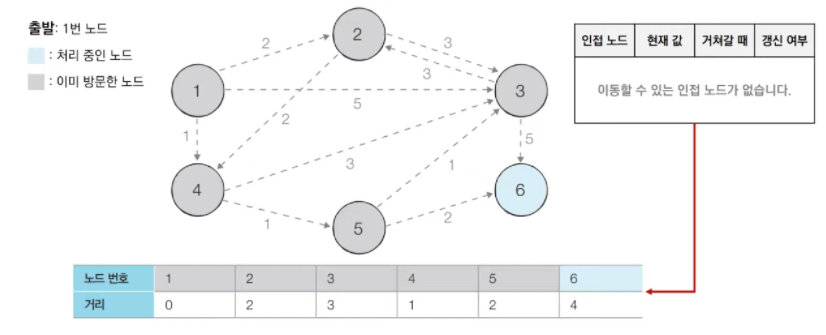
- step 6 : 그 다음 최단 거리인 6번 노드를 선택한 후 같은 과정을 반복한다. 지금까지의 최종 최단 거리 테이블은 다음과 같다.
간단한 다익스트라 알고리즘 코드 (Python)
# * 단계마다 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드를 선택하기 위해
# 매 단계마다 1차원 테이블의 모든 원소를 확인(순차 탐색)한다.
import sys
INF = int(1e9) # 입력 값의 범위를 고려해서 무한을 의미하는 값으로 10억을 설정
# 노드의 개수, 간선의 개수를 입력받기
n, m = map(int, sys.stdin.readline().rstrip().split())
# 시작 노드 번호를 입력받기
start = int(sys.stdin.readline().rstrip())
# 각 노드에 연결되어 있는 노드에 대한 정보를 담는 리스트를 만들기
graph = [[] for _ in range(n + 1)]
# 방문한 적이 있는지 체크하는 목적의 리스트를 만들기
visited = [False] * (n + 1)
# 최단 거리 테이블을 모두 무한으로 초기화
distance = [INF] * (n + 1)
# 모든 간선 정보를 입력받기
for _ in range(m):
a, b, c = map(int, sys.stdin.readline().rstrip().split())
# a번 노드에서 b번 노드로 가는 비용이 c라는 의미
graph[a].append((b, c))
# 방문하지 않은 노드 중에서, 가장 최단 거리가 짧은 노드의 번호를 반환
def get_smallest_node():
min_value = INF
index = 0 # 가장 최단 거리가 짧은 노드(인덱스)
for i in range(1, n + 1):
if distance[i] < min_value and not visited[i]:
min_value = distance[i]
index = i
return index
# 다익스트라 함수
def dijkstra(start):
# 시작 노드에 대해서 초기화
distance[start] = 0
visited[start] = True
for j in graph[start]: # 시작 노드에 대해서
distance[j[0]] = j[1] # i[0] 까지 가는 거리를 i[1]로 갱신
# 시작 노드를 제외한 전체 n - 1 개의 노드에 대해 반복
for i in range(n - 1):
# 현재 최단 거리가 가장 짧은 노드를 꺼내서, 방문 처리
now = get_smallest_node()
visited[now] = True
# 현재 노드와 연결된 다른 노드를 확인
for j in graph[now]:
cost = distance[now] + j[1] # 현재 노드를 거쳐 연결된 노드로 이동하는 거리(비용)
# 현재 노드를 거쳐서 다른 노드로 이동하는 거리가 더 짧은 경우
if cost < distance[j[0]]:
distance[j[0]] = cost
# 다익스트라 알고리즘 수행
dijkstra(start)
# 모든 노드로 가기 위한 최단 거리를 출력
for i in range(1, n + 1):
# 도달할 수 없는 경우, 무한(INFINITY)이라고 출력
if distance[i] == INF:
print("INFINITY")
# 도달할 수 있는 경우 거리를 출력
else:
print(distance[i])
'''
입력 예시
6 11
1
1 2 2
1 3 5
1 4 1
2 3 3
2 4 2
3 2 3
3 6 5
4 3 3
4 5 1
5 3 1
5 6 2
출력 예시
0
2
3
1
2
4
'''단계를 거치면서 한 번 처리된 노드의 최단 거리는 고정되어 더 이상 바뀌지 않는다.
왜냐하면 최단 거리보다 큰 거리로 갱신되면 이는 최단 거리가 아니기 때문이다.
즉, 한 단계당 하나의 노드에 대한 최단 거리를 확실하게 찾은 것이라고 이해하면 된다.
왜 1차원 리스트에는 '최단 거리'만을 저장하고 있는지 궁굼할 수 있다. 한 지점에서 다른 지점까지의 최단 거리이기 때문이다.
모든 지점에서 다른 모든 지점까지의 최단 거리를 구하려면, 플로이드 워셜 알고리즘을 이용하자.
간단한 다익스트라 알고리즘의 시간 복잡도
- 시간 복잡도는 O(V^2) ※V는 노드의 개수를 의미
총 O(V) 번에 걸쳐서 최단 거리가 가장 짧은 노드를 매번 선형 탐색해야 하고, 현재 노드와 연결된 노드를 매번 일일이 확인하기 때문이다.
코딩 테스트의 최단 경로 문제에서 전체 노드의 개수가 5,000개 이하이면 일반적으로 풀 수 있다. 하지만 노드의 개수가 10,000개를 넘어가는 문제라면 위 코드로 문제를 풀 수 없다.
이를 해결하려면 '개선된 다익스트라 알고리즘'을 사용해야 한다.
힙 설명
힙 자료구조에 대해서 간단히 알아보자. 힙 자료구조는 우선순위 큐(Priority Queue)를 구현하기 위하여 사용하는 자료구조 중 하나다.
'DFS / BFS' 를 공부할 때 스택(Stack)과 큐(Queue)의 원리에 대해서 알아보았다.
스택은 가장 나중에 삽입된 데이터를 가장 먼저 삭제하고,
큐는 가장 먼저 삽입된 데이터를 가장 먼저 삭제한다.
우선순위 큐는 우선순위가 가장 높은 데이터를 가장 먼저 삭제한다는 점이 특징이다.
스택, 큐, 우선순위 큐 자료구조를 비교한 내용을 표로 나타내면 다음과 같다.

우선순위 큐는 데이터를 우선순위이 따라 처리하고 싶을 때 사용한다.
예를 들어 여러 개의 물건 데이터를 자료구조에 넣었다가 가치가 높은 물건 데이터부터 꺼내서 확인해야 하는 경우를 가정해보자.
이런 경우에 우선순위 큐 자료구조를 이용하면 효과적이다.
파이썬에서는 우선순위 큐가 필요할 때 PriorityQueue 혹은 heapq를 사용할 수 있는데, 이 두 라이브러리는 모두 우선순위 큐 기능을 지원한다. 다만, PriorityQueue 보다는 일반적으로 heapq가 더 빠르게 동작하기 때문에 수행시간이 제한된 상황에서는 heapq를 사용하는 것을 권장한다.
우선순위 값을 표현할 때는 일반적으로 정수형 자료형의 변수가 사용된다. 예를 들어 물건 정보가 있고, 이 물건 정보는 물건의 가치와 물건의 무게로만 구성된다고 가정해보자. 그러면 모든 물건 데이터를 (가치, 물건)으로 묶어서 우선순위 큐 자료구조에 넣을 수 있다.
우선순위 큐 라이브러리에 데이터의 묶음을 넣으면, 첫 번째 원소를 기준으로 우선순위를 설정한다. 따라서 데이터가(가치, 물건)으로 구성된다면 '가치' 값이 우선순위 값이 되는 것이다. 이는 파이썬에서도 마찬가지다.
우선순위 큐를 구현할 때는 내부적으로 최소 힙(Min Heap) 혹은 최대 힙(Max Heap)을 이용한다.
최소 힙을 이용하는 경우 '값이 낮은 데이터가 먼저 삭제'되며, 최대 힙을 이용하는 경우 '값이 큰 데이터가 먼저 삭제'된다. 파이썬 라이브러리에서는 기본적으로 최소 힙 구조를 이용하는데 다익스트라 최단 경로 알고리즘에서는 비용이 적은 노드를 우선하여 방문하므로 최소 힙 구조를 기반으로 하는 파이썬의 우선순위 큐 라이브러리를 그대로 사용하면 적합하다.
또한 최소 힙을 최대 힙 처럼 사용하기 위해서 일부러 우선순위에 해당하는 값에 음수 부호(-)를 붙여서 넣었다가, 나중에 우선순위 큐에서 꺼낸 다음에 다시 음수 부호(-)를 붙여서 원래의 값으로 돌리는 방식을 사용할 수 있다. 이러한 테크닉도 실제 코딩 테스트 환경에서는 자주 사용되기 때문에 기억해 놓자.
앞서 우선순위 큐를 구현할 때는 힙 자료구조를 이용한다고 했는데, 사실 우선순위 큐를 구현하는 방법은 다양하다.
단순히 리스트를 이용해서 구현할 수도 있다. 데이터의 개수가 N개일 때, 구현 방식에 따라 시간 복잡도를 비교한 내용을 표로 확인해 보자. 리스트를 이용해서 우선순위 큐의 기능을 구현하기 위해서는 삭제할 때마다 모든 원소를 확인해서 우선순위가 가장 높은 것을 찾아야 하므로 최악의 경우 O(N)의 시간이 소요된다.
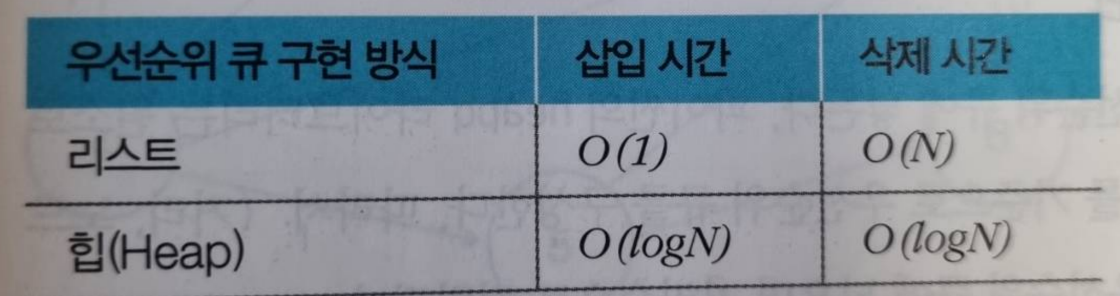
데이터의 개수가 N개일 때, 힙 자료구조에 N개의 데이터를 모두 넣은 뒤에 다시 모든 데이터를 꺼낸다고 해보자. 이때의 시간복잡도는 어떻게 될까? 삽입할 떄는 O(logN)의 연산을 N번 반복하므로 O(NlogN)이다. 따라서 전체 연산 횟수는 대략 2Nlog(_2)N 으로 빅오 표기법에 따라 전체 시간 복잡도는 O(NlogN)이 될 것이다. 사실 이는 힙 정렬(Heap Sort)의 원리를 설명한 것이며, 힙 정렬 구현 소스코드는 이코테 책 부록 A의 파이썬 문법 파트에서 제시하고 있다. 만약 동일한 작업을 리스트를 이용해 수행하고자 한다면, 시간 복잡도가 O(N^2)가 된다. N이 커지면 커질수록 시간 차이는 극명할 것이며, 대부분의 경우 힙을 이용했을 때 훨씬 빠르게 동작한다. 이처럼 힙을 이용하는 경우 모든 원소를 저장한 뒤에 우선순위에 맞게 빠르게 뽑아낼 수 있으므로 힙은 '우선순위 큐'를 구현하는데 가장 많이 사용된다.
최소 힙을 이용하는 경우 힙에서 원소를 꺼내면 '가장 값이 작은 원소'가 추출되는 특징이 있으며, 파이썬의 우선순위 큐 라이브러리는 최소 힙에 기반한다는 점을 기억하자. 우리는 이러한 최소 힙을 다익스트라 최단 경로 알고리즘에 적용할 것이다. 단순히 우선순위 큐를 이용해서 시작 노드로부터 '거리'가 짧은 노드 순서대로 큐에서 나올 수 있도록 다익스트라 알고리즘을 작성하면 된다.
개선된 다익스트라 알고리즘 그림으로 보기
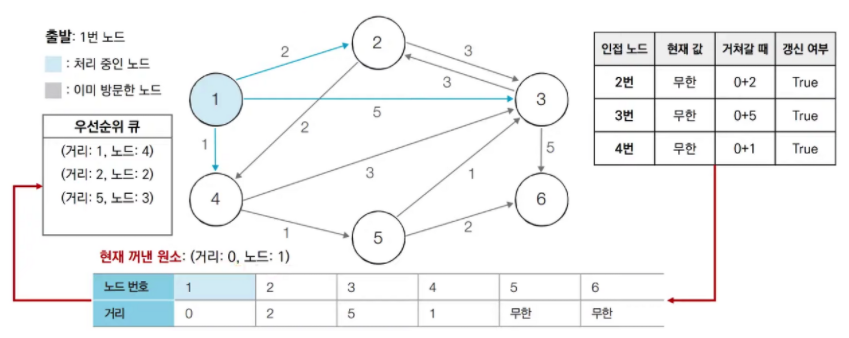
- step 0 : 역시 1번 노드가 출발 노드인 경우를 고려해보자. 여기서는 다음과 같이 출발 노드를 제외한 모든 노드의 최단 거리를 무한으로 설정한다. 이후에 우선순위 큐에 1번 노드를 넣는다. 이때 1번 노드로 가는 거리는 자기 자신까지 도달하는 거리이기 때문에 0이다.
즉, (거리: 0, 노드: 1)의 정보를 가지는 객체를 우선순위 큐에 넣으면 된다.
파이썬에서는 간단히 튜플(0, 1)을 우선순위 큐에 넣는다. 파이썬의 heapq 라이브러리는 원소로 튜플을 입력받으면 튜플의 첫 번째 원소를 기준으로 우선순위 큐를 구성한다. 따라서 (거리, 노드 번호) 순서대로 튜플 데이터를 구성해 우선순위 큐에 넣으면 거리 기준으로 오름차순 정렬된다.

- step 1 : 우리는 우선순위 큐를 이용하고 있으므로 거리가 가장 짧은 노드를 선택하기 위해서는 우선순위 큐에서 그냥 노드를 꺼내면 된다. 기본적으로 거리가 짧은 원소가 우선순위 큐의 최상위 원소로 위치해 있다.
따라서 [step 1]의 우선순위 큐에서 원소를 꺼내면 (0, 1)이 나온다. 이는 1번 노드까지 가는 최단 거리가 0이라는 의미이므로, 1번 노드를 거쳐서 2번, 3번, 4번 노드로 가는 최소 비용을 계산한다.
차례대로 2(0 + 2), 5(0 + 5), 1(0 + 1)이다. 현재 2번, 3번, 4번 노드로 가는 비용이 '무한'으로 설정되어 있는데, 더 짧은 경로를 찾았으므로 각각 갱신하면 된다. 이렇게 더 짧은 경로를 찾은 노드 정보들은 다시 우선순위 큐에 넣는다.
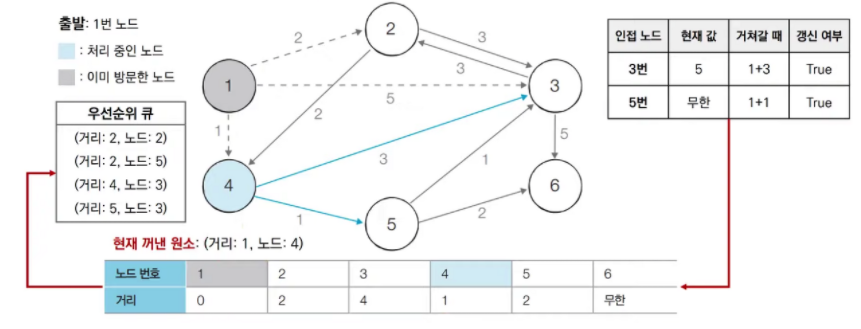
- step 2 : 이어서 다시 우선순위 큐에서 원소를 꺼내서 동일한 과정을 반복한다. 이번에는 (1, 4)의 값을 찾는 원소가 추출된다. 아직 노드 4를 방문하지 않았으며, 현재 최단 거리가 가장 짧은 노드가 4이다. 따라서 노드 4를 기준으로 노드 4와 연결된 간선들을 확인한다. 이때 4번 노드까지의 최단 거리는 1이므로 4번 노드를 거쳐서 3번과 5번 노드로 가는 최소 비용은 차례대로 4(1 + 3)과 2(1 + 1)이다. 이는 기존의 리스트에 담겨 있던 값들보다 작기 때문에 다음과 같이 리스트가 갱신되고, 우선순위 큐에는 (4, 3), (2, 5)라는 두 원소가 추가로 들어가게 된다. 앞서 말했듯이 현재 그림에서는 튜플의 첫 번째 원소(거리)가 작은 순서대로 왼쪽부터 기록하고 있다. 따라서 갱신된 우선순위 큐 또한 그림처럼 그려진다.
- step 3 : 마찬가지로 [step 3]에서는 노드 2에 대해 처리한다. 2번과 5번 노드까지의 최단 거리가 모두 값이 2로 같으므로 어떤 원소부터 처리해도 상관은 없지만, 우선순위 큐에서 2번 노드가 꺼내졌다고 가정하자. 마찬가지로 2번 노드를 거쳐서 도달할 수 있는 노드 중에서 더 거리가 짧은 경우가 있는지 확인한다. 이번 단계에서는 2번 노드를 거쳐서 가는 경우 중 현재의 최단 거리를 더 짧게 갱신할 수 있는 방법은 없다. 따라서 우선순위 큐에 어떠한 원소도 들어가지 않고 다음과 같이 리스트가 갱신된다.

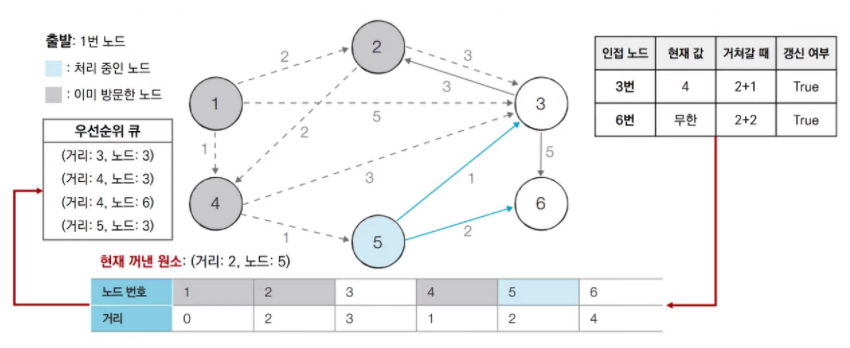
- step 4 :이번 단계에서는 노드 5에 대해 처리한다. 5번 노드를 거쳐서 3번과 6번 노드로 갈 수 있다. 현재 5번 노드까지 가는 최단 거리가 2이므로 5번 노드에서 3번 노드로 가는 거리인 1을 더한 3이 기존의 값인 4보다 작다. 따라서 새로운 값인 3으로 갱신한다. 또한 6번 노드로 가는 최단 거리 역시 마찬가지로 갱신된다. 그래서 이번에는 (3, 3)과 (4, 6)이 우선순위 큐에 들어간다.
- step 5 : 마찬가지로 원소 (3, 3)을 꺼내서 3번 노드를 기준으로 알고리즘을 수행한다. 최단 거리 테이블이 갱신되지 않으며 결과는 다음과 같다.
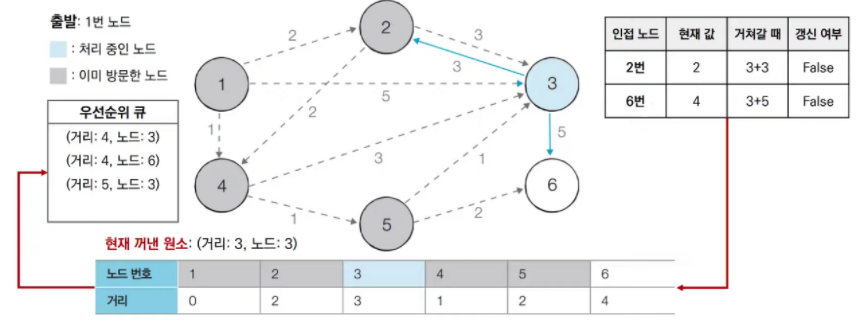
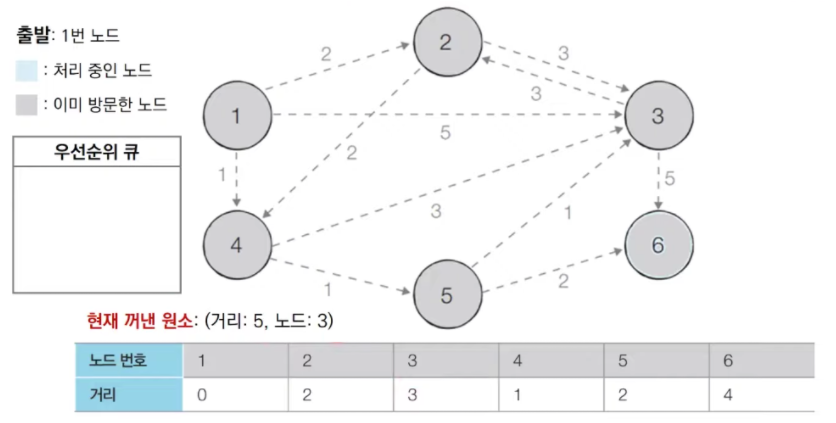
- step 6 : 이어서 원소 (4, 3)을 꺼내서 3번 노드를 기준으로 알고리즘을 수행한다. 다만, 3번 노드는 앞서 처리된 적이 있다. 현재 우선순위 큐에서 꺼낸 원소에는 3번 노드까지 가는 최단 거리가 4라는 정보가 들어 있다. 하지만 현재 최단 거리 테이블에서 3번 노드까지의 최단 거리는 3이다. 따라서 현재 노드의 3번에 대해서는 이미 처리된 것으로 볼 수 있으므로 현재 우선순위 큐에서 꺼낸 (4, 3)이라는 원소는 무시하면 된다.

- step 7 : 이어서 원소 (4, 6)이 꺼내진다. 따라서 6번 노드에 대해서 처리하면 다음과 같다.

- step 8 : 마지막으로 남은 원소를 꺼내지만, 아까와 마찬가지로 이미 처리된 노드이므로 무시한다.
개선된 다익스트라 알고리즘 코드(Python
단계마다 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드를 선택하기 위해 최소 힙(Heap) 기반 우선순위 큐 자료구조를 이용한다.
개선된 다익스트라 알고리즘이 동작하는 기본 원리는 동일하다.
- 현재 가장 가까운 노드를 저장해 놓기 위해서 힙 자료구조를 추가적으로 이용한다는 점이 다르다.
- 현재의 최단 거리가 가장 짧은 노드를 선택해야 하므로 최소 힙을 사용한다. (Python은 기본 우선순위 큐가 최소힙 기반이다.)
import heapq
import sys
INF = int(1e9) # 무한을 의미하는 값으로 10억을 설정
# 노드의 개수, 간선의 개수를 입력받기
n, m = map(int, sys.stdin.readline().rstrip().split())
# 시작 노드 번호를 입력바딕
start = int(sys.stdin.readline().rstrip())
# 각 노드에 연결되어 있는 노드에 대한 정보를 담는 리스트를 만들기
graph = [[] for i in range(n + 1)]
# 최단 거리 테이블을 모두 무한으로 초기화
distance = [INF] * (n + 1)
# 모든 간선 정보를 입력받기
for _ in range(m):
a, b, c = map(int, sys.stdin.readline().rstrip().split())
# a번 노드에서 b번 노드로 가는 비용이 c라는 의미
graph[a].append((b, c))
def dijkstra(start):
q = []
# 시작 노드로 가기 위한 최단 경로를 0으로 설정하여, 큐에 삽입
heapq.heappush(q, (0, start))
distance[start] = 0
while q: # 큐가 비어있지 않다면
# 가장 최단 거리가 짧은 노드에 대한 정보 꺼내기
dist, now = heapq.heappop(q)
# 현재 노드가 이미 처리된적 있는 노드라면 무시, 별도의 visited 테이블이 필요없이, 최단거리 테이블을 이용해 방문여부 확인
if distance[now] < dist:
continue
# 현재 노드와 연결된 다른 인접한 노드들을 확인
for i in graph[now]:
cost = dist + i[1]
# 현재 노드를 거쳐서, 다른 노드로 이동하는 거리가 더 짧은 경우
if cost < distance[i[0]]:
distance[i[0]] = cost
heapq.heappush(q, (cost, i[0]))
# 다익스트라 알고리즘을 수행
dijkstra(start)
# 모든 노드로 가기 위한 최단 거리를 출력
for i in range(1, n + 1):
# 도달할 수 없는 경우, 무한(INFINITY)이라고 출력
if distance[i] == INF:
print('INFINITY')
else:
print(distance[i])
'''
입력 예시
6 11
1
1 2 2
1 3 5
1 4 1
2 3 3
2 4 2
3 2 3
3 6 5
4 3 3
4 5 1
5 3 1
5 6 2
출력 예시
0
2
3
1
2
4
'''개선된 다익스트라 알고리즘의 시간복잡도
- 시간 복잡도는 O(ElogV) ※V는 노드의 개수, E는 간선의 개수를 의미
노드를 하나씩 꺼내 검사하는 반복문(while문)은 노드의 개수 V 이상의 횟수로는 반복되지 않는다.
또한 V번 반복될 때마다 자신과 연결된 간선들을 모두 확인한다.
따라서 '현재 우선순위 큐에서 꺼낸 노드와 연결된 다른 노드들을 확인'하는 총 횟수는 총 최대 간선의 개수(E)만큼 연산이 수행될 수 있다.
결과적으로 전체 다익스트라 최단 경로 알고리즘은 E개의 원소를 우선순위 큐에 넣었다가 모두 빼내는 연산과 매우 유사하다고 볼 수 있다.(이는 O(ElogE)의 시간 복잡도를 가진다.)
중복 간선을 포함하지 않는 경우에 이를 O(ElogV)로 볼 수 있다. 왜냐하면 모든 노드끼리 서로 다 연결되어 있다고 했을 때 간선의 개수를 V^2로 볼 수 있으며 E는 항상 V^2이하이기 때문이다.
- 우선순위 큐에서 꺼낸 현재 노드에 연결된 간선을 모두 확인 - 간선 개수(E) 만큼 확인
- 우선순위 큐에 간선을 넣고 빼는 과정 - logE
- 따라서 모든 간선을 우선순위 큐에 넣고 뺀다고 했을 때 O(ElogE)의 시간복잡도를 갖는다.
- 이때, 중복 간선을 포함하지 않는 경우, E는 항상 V^2 이하이다. (모든 노드가 연결되어 있는 경우 V * (V-1)
- logE < log(V^2) 이다. log(V^2)는 2logV이기 때문에 O(logV)로 표현할 수 있다.
- 따라서 다익스트라 알고리즘의 전체 시간복잡도를 O(ElogV)로 표현할 수 있다.
다익스트라 알고리즘 사용시 주의점
그래프 방향의 유무는 상관 없으나, 간선들(edges)중 단 하나라도 가중치가 음수이면 다익스트라 알고리즘은 사용할 수 없다.
음의 가중치를 가지는 간선이 있으며, 가중차의 합이 음인 사이클이 존재하지 않는 경우, 벨만 포드 알고리즘을 사용할 수 있다.
또한 그래프 내에 가중치 합이 음인 사이클이 존재한다면 무한히 음의 사이클을 도는 경우에 경로 합이 음수 무한대로 발산하기 때문에 그래프 내의 최단 경로는 구성할 수 없다.
또한 다익스트라 알고리즘은 하나의 노드로부터 최단 경로를 구하는 알고리즘이다.
만약, 가능한 모든 노드쌍들에 대한 최단거리를 구해야 하면, 플로이드-워셜 알고리즘을 사용하자.
'Algorithm' 카테고리의 다른 글
| 9. [Algorithm] Union-Find 알고리즘 (서로소 집합 Disjoint-Set) (0) | 2023.03.24 |
|---|---|
| 8. [Algorithm] 플로이드 워셜 알고리즘 (최단 경로) (0) | 2023.03.24 |
| 6. [Algorithm] 다이나믹 프로그래밍 (0) | 2023.03.21 |
| 5. [Algorithm] 이진 탐색 (0) | 2023.03.20 |
| 4. [Algorithm] 정렬 (0) | 2023.03.20 |